Experimenting with Commercial Quadcopters for Jungle RSTA
By 1LT Alex choy
DOI: https://doi.org/10.21236/AD1307147

Soldiers in the 25th Infantry Division employ a quadcopter during a training event. (Photo by SPC Benjamin Anderson)
Crouched behind a berm, SSG Noah Jacques, a “Wolfhound” from 1st Battalion, 27th Infantry Regiment, 2nd Infantry Brigade Combat Team, 25th Infantry Division (2/25ID), manipulated the joysticks on his quadcopter’s controller. Hearing his radio crackle with a report of a rapidly approaching dust cloud, SSG Jacques sent the aircraft into a search pattern, spotting a tank through its high-resolution camera. Subsequently, as the tank closed within 300 meters, SSG Jacques buzzed its turret, distracting its commander and enabling his platoon’s Carl Gustaf team to acquire and neutralize their target.
The above vignette is just one example of how 2/25ID employed commercial off-the-shelf (COTS) quadcopters to fill a gap in the brigade’s short-range reconnaissance, surveillance, and target acquisition (RSTA) capability. By distributing a user-friendly and cost-effective solution down to the platoon level, 2/25ID enabled a tight sensor-to-shooter link, dynamically driving targeting and intelligence during an Operation Pathways field training exercise in complex jungle terrain.
The Capability Gap
Because jungle patrols involve high levels of risk and require timely information due to frequent engagements, the need for dedicated and dynamically re-taskable RSTA is most critical at the light infantry platoon. This is to ensure immediate situational awareness for shortened decision-making cycles and exercising disciplined initiative (see Figure 1). Also, by distributing RSTA assets to the platoon, a battalion commander forms a web of sensors across the battlefield, increasing the larger intelligence picture by ensuring redundancy within the information collection plan.
High tactical risk also necessitates that any small unmanned aerial system (SUAS) distributed to platoons be attritable — in other words, low cost and simple enough that its loss is acceptable to the unit. However, given the challenges with the program of record SUAS currently in service, the platoon aerial RSTA capability remains largely unrealized.
The fixed-wing Raven SUAS typically investigates battalion-level named areas of interest (NAIs) far ahead of a platoon’s immediate objective. Consequently, having only one Raven available per company limits opportunities for discretionary reconnaissance unless a company is its battalion’s decisive operation. Even if under the operational control of a platoon, the Raven’s cumbersome antenna array and ground control station (GCS) can make it unwieldy for dismounted patrols to employ during a short halt in restrictive terrain.
Furthermore, a thick jungle canopy denies fixed-wing flight below the tree line, leaving those monitoring line-of-sight (LOS)-dependent sensors grasping for glimpses of activity through gaps in the foliage. Target acquisition and laser return are often similarly degraded, especially when factoring in the jungle’s prevailing high humidity and precipitation that can cause beam scatter. Additionally, because a fixed-wing design requires obstacle-free open areas to generate enough lift for launch, a savvy enemy S2 can deduce friendly employment sites through terrain analysis, leading to friendly forces being targeted.
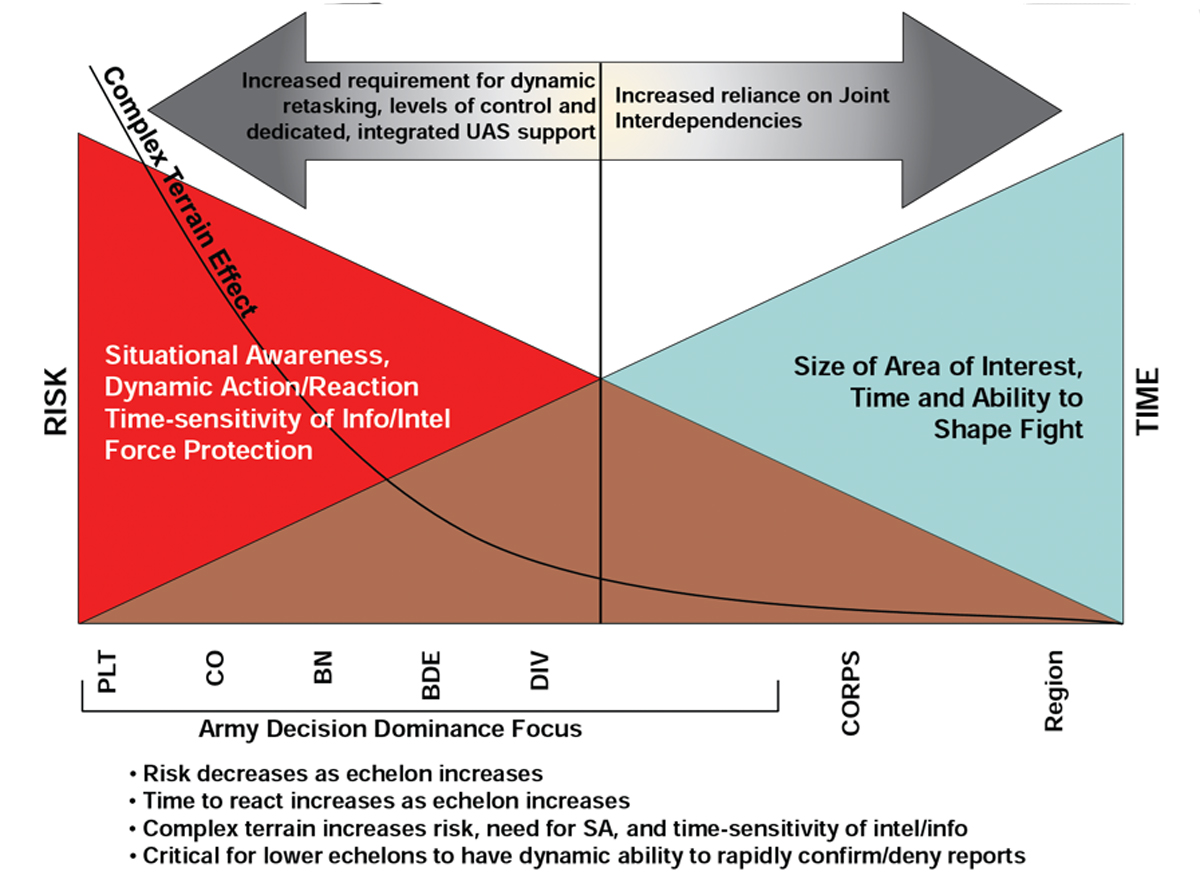
Figure 1 — Time Versus Risk by Echelon
Delivering a rapidly deployable RSTA capability requires SUAS to be capable of translational flight (slow, fast, lateral, longitudinal, and hover) below the jungle canopy — in short, a vertical takeoff and launch (VTOL) SUAS. The two-ounce, single-rotor Black Hornet 3 — part of the Soldier Borne Sensor program of record — is one such system that already exists at the platoon level. Its range of 1.5 kilometers and 25 minutes of endurance is just enough for a dismounted patrol to check their immediate surroundings. One can take a knee and quickly launch it from their palm, viewing progress in real time on a chest-mounted Android Tactical Assault Kit (ATAK).
The Hornet’s compact design is also its deal-breaking shortfall. Its weight makes it highly susceptible to wind. Moreover, with only one rotor, even minor collisions with small branches mid-flight can result in a catastrophic loss of lift and unrecoverable fall. In combat, valuable time spent searching for a 7-inch object on the jungle floor is not a luxury one can afford. Consequently, it is perhaps better suited for indoor environments that minimize unpredictable environmental interference.
Saddled with two sub-optimal program-of-record platforms, the brigade aviation cell researched a cost-effective solution on the consumer market, acquiring the Anafi Parrot, a “Blue UAS” Department of Defense-approved quadcopter. Unlike the Raven and Hornet, implemented Armywide as one-size-fits-all solutions, COTS platforms enable unit-level equipment specialization and rapid, bottom-up refinement via direct feedback from end users.
Leveraging COTS to Reduce Risk-Avoidant Behavior
Ensuring pilots fly regularly to maintain proficiency is a significant hurdle to maximizing RSTA potential at the battalion level and below. Far too often, instead of enabling commanders during training, “cumbersome regulations and mazes of doctrinal guidance” often compel a counterintuitive default to risk avoidance, fueling a vicious cycle of pilots’ degenerating skills and ever-increasing risk. This problem’s root lies with the staggering costs of program-of-record SUAS, combined with barriers to employment from a training management and user-friendliness perspective.
Wary of accidents, company commanders often opt to keep their SUAS grounded to avoid paying for repair parts (Class IX) with scarce unit funds. Interviews of SUAS pilots by students at the Naval Postgraduate School reveal that risk avoidance is endemic across the force. One interviewee explained that because systems are so expensive, “units will never prioritize [them] over rolling stock or pacing items … [and instead of purchasing Class IX] they will do controlled substitutions… leading to more unserviceable systems.”
In contrast, the Parrot costs $16,000, a fraction of the Raven. The price difference is likely attributable to the fact that quadcopters are mechanically simpler and consequently cheaper to produce than single-rotor systems. Additionally, a consumer market targeted at hobbyists incentivizes manufacturers to ensure competitive pricing. Repair parts can be purchased via government purchase card from an extensive list of local vendors, introducing another layer of price-gouging protection. Consequently, COTS quadcopters present a cost-effective and scalable solution for platoon jungle RSTA.
From a training management perspective, the more “red tape” installations have around procedures to fly, the more units will have underqualified pilots due to taking the path of least resistance in the face of competing requirements. Traditionally, flying SUAS in Hawaii necessitates a lengthy journey to either Makua Training Area in Northwest Oahu or Pohakuloa Training Area on the Big Island due to airspace restrictions and population density. To enable subordinate units’ training by alleviating administrative and logistical requirements, the 2/25ID’s Brigade Aviation Element established a quadcopter ready range on Schofield Barracks with pre-approved airspace.
At the ready range, the aviation cell holds a monthly qualification to certify quadcopter pilots, combining classroom academics and flight training into a single day of instruction, with subsequent refresher flights as reinforcement. The quadcopter’s intuitive controls make this short period of instruction possible — with most students feeling comfortable with flying in the first hour. Its controls are also generally easily translatable to other quadcopter models. In contrast, the minimum qualification for Raven pilots lasts three weeks, requiring a monthly simulation flight and bi-yearly live flight to maintain currency thereafter.
Field Testing and Recommendations
During Operations Pathways, 1-27 IN tested the COTS quadcopter’s viability in an area characterized predominately by jungle savanna and rice paddies. Despite colliding with vegetation, it proved extremely durable, sustaining minimal damage. Flying approximately 200-500 meters ahead of their patrol during short halts, a pilot related the process to fly fishing. He would cast his line, check an area of interest, and then move on if no targets of opportunity were spotted. Upon acquiring a target, pilots relied on terrain association to rapidly call for fire, matching the quadcopter’s camera to ATAK imagery to generate a 10-digit grid location.
Experimenting in a jungle environment also highlighted COTS SUAS’ limitations. Thick vegetation can reflect and attenuate Global Positioning System (GPS) signals, resulting in large position errors — unacceptable for danger-close fire missions prevalent in the jungle. Dependent on a GPS signal to stay aloft, the quadcopter was forced to land upon losing its GPS link. On the other hand, although agile enough to penetrate the canopy to acquire a stronger GPS signal, flying above the tree line disrupted the LOS connection between the aircraft and controller, significantly degrading the quadcopter’s effective range. Posing an additional challenge, due to its commercial origins, the quadcopter cannot operate on jam-resistant M-code (military) GPS.
Procuring a platform with an inertial navigation system (INS) could provide a workaround for operating in a GPS-denied area. Once given a starting position, an INS utilizes accelerometers and gyroscopes to calculate its position, direction, and velocity by dead reckoning. Flying an INS-equipped quadcopter capable of delivering accurate positional data, a pilot could use the aircraft’s distance and heading to call in a polar fire mission. However, a low-cost, tactical-grade INS’s readings will quickly drift without subsequent GPS inputs. Moreover, INS error and instrument price/complexity are inversely correlated, making it difficult to reconcile for use in an “attritable” platform.
Utilizing visual inputs from the quadcopter’s camera to estimate its location and avoid obstacles provides a possible workaround that does not detract from its limited payload capacity. Most notably, visual simultaneous localization and mapping (vSLAM) algorithms appear promising and warrant additional study. However, any vision-based approach will likely face significant hurdles while operating in heavily vegetated environments due to highly dynamic scenes and visual clutter that can interfere with image capture and processing.
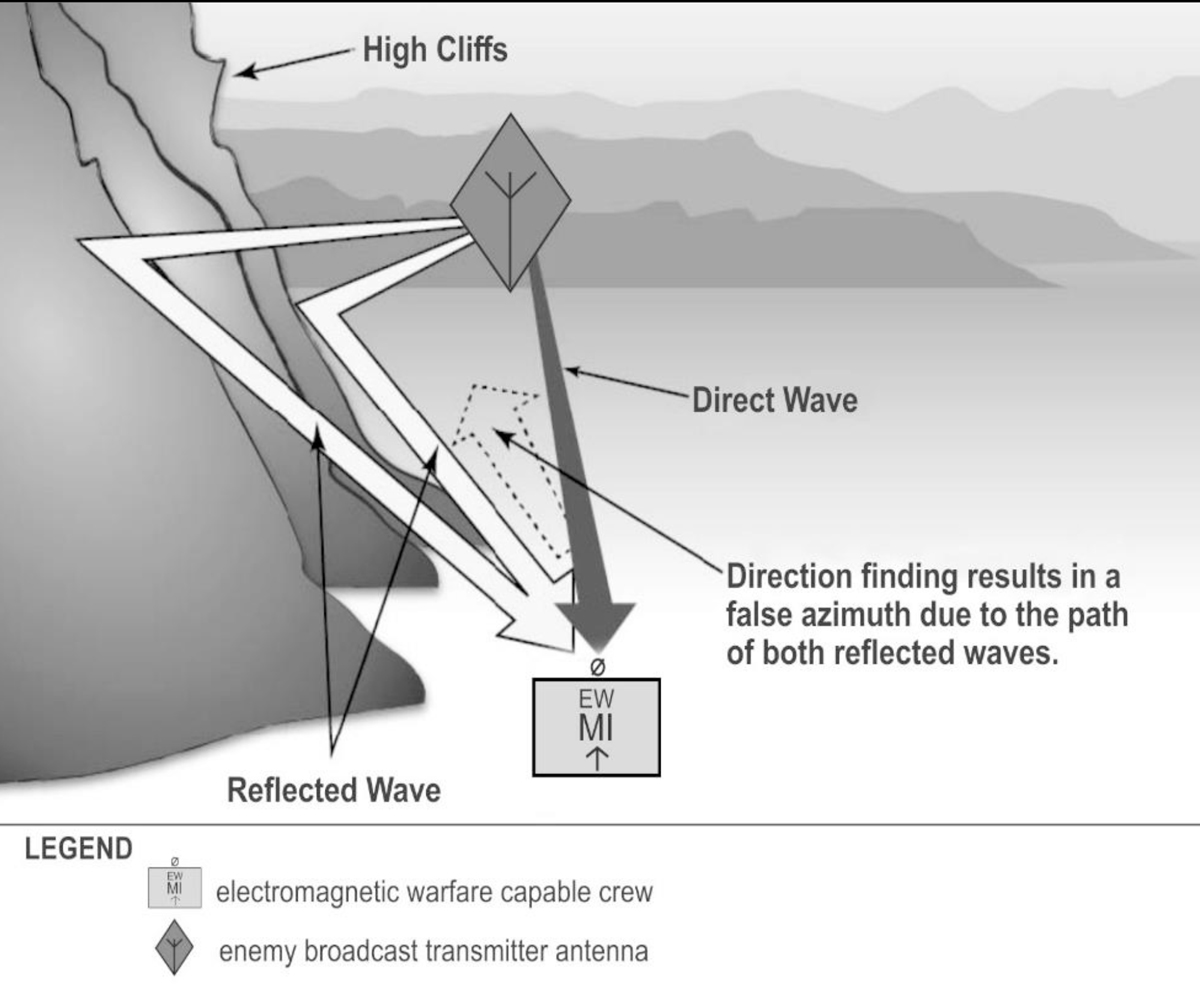
Figure 2 — Example of Radio Wave Reflection
While the quadcopter airframe was suited for reconnaissance and target acquisition, it fell short while conducting persistent surveillance due to its short flight time and lack of an efficient decentralized charging capability. To maximize battery life by minimizing flight time, Wolfhounds employed a cueing strategy: integrating observation posts and other intelligence enablers to trigger the quadcopter’s follow-on collection of more detailed information. Additionally, experimentation with portable battery packs is ongoing to present platoons with a charging solution that avoids compromising the quadcopter’s advantageous size and weight.
In a worst-case scenario, an enemy calls in indirect fires on a platoon after triangulating a quadcopter controller’s radio-frequency (RF) link with signals intelligence (SIGINT) direction-finding equipment. To avoid compromise and subsequent exploitation, pilots should reduce their RF signature by implementing terrain masking during flight operations by placing a terrain feature between their controller and the enemy sensor. Similarly, pilots can attempt to fly near terrain that will reflect radio waves and result in a false azimuth to generate enemy direction-finding errors. For example, during jungle patrols in Indonesia, the denser vegetation and steep slopes to the platoon’s left and right helped limit detection. However, platoon leaders must take existing intelligence estimates into account when weighing the tactical risk of moving along canalizing terrain versus the likelihood of enemy SIGINT threat.
Since quadcopters’ rotors emit a distinct sound, pilots should also take precautions to mask their acoustic signature. Flying the quadcopter in dense vegetation can help dampen the sound. When combined with a laser designator to maximize standoff distance, pilots can use the jungle’s complex terrain to their advantage, since sound waves may travel around a hill or mountain before arriving at an enemy observer’s position, providing a false azimuth to the aircraft.
Because jungle patrols involve high levels of risk and require timely information due to frequent engagements, the need for dedicated and dynamically re-taskable RSTA is most critical at the light infantry platoon. This is to ensure immediate situational awareness for shortened decision-making cycles and exercising disciplined initiative.
Conclusion
The COTS quadcopter airframe proved agile and durable during testing. However, the lack of a GPS-denied flight capability was a major limiting factor for navigation and target acquisition. The 2/25ID has trained more than 100 pilots to date. Those trained are not limited to the rank and file — enthusiasm for the COTS quadcopter is evident, with senior enlisted leadership often qualifying on the system to better advise their formations. Accordingly, an increased willingness to employ the quadcopter compared to legacy systems has been observed due to the risk mitigation afforded by the platform’s user-friendliness, lower cost, and increased opportunities for training.
The Army is currently testing the RQ-28 as part of the Short-Range Reconnaissance (SRR) program of record. Based on the Skydio X2D, a Department of Defense-approved COTS quadcopter, the Army intends for the RQ-28 to fill the platoon aerial RSTA capability gap. Because RQ-28 will take several years to field, units should continue to procure COTS quadcopters as a stop-gap solution to develop techniques, tactics, and procedures and a robust pilot base prior to RQ-28 fielding. After the RQ-28’s adoption, units should continue to utilize and procure the COTS quadcopter as a training aircraft to build pilot competency while mitigating risk.
Endnotes
Author
At the time this article was written, 1LT Alex Choy served as the assistant S2 in 1st Battalion, 27th Infantry Regiment, 2nd Infantry Brigade Combat Team, 25th Infantry Division. His operational experience includes completing a Combat Training Center rotation and two Operation Pathways missions. 1LT Choy currently serves as the brigade intelligence support element platoon leader in the 65th Brigade Engineer Battalion, 2/25ID. He is a 2021 graduate of the University of California, Los Angeles (UCLA).
Updated Training Guide Now Available
The Training Management Directorate, Combined Arms Center-Training recently updated the March 2023 training management guide “Platoon Level Training Management” to better reflect platoon-level training. Titled “Platoon Leader’s Guide to Training Management,” this updated guide provides leaders at platoon and below with effective training techniques and procedures that complement Field Manual (FM) 7-0, Training, and enable the processes that help achieve training proficiency.
https://atn.army.mil/getmedia/c9e0e234-5ea2-40b4-819a-9106651a1fae/PLT-LDR-Guide-to-TNG-MGMT-(FINAL)-15OCT23.pdf